
福島原発建屋で活躍する「Quince(クインス)」
科学 技術・デジタル- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
2011年3月に発生した東京電力福島第一原子力発電所の事故。その処理作業には世界中が注目している。一刻も早く廃炉に向けた作業を進めたいが、放射線量が極めて高く、原子炉建屋内で人間が長時間作業するのは困難だ。そこで導入されたのが“災害対応ロボット”だ。人間が立ち入れない場所で、温度や湿度等のデータ計測、動画撮影などを行っている。
国産ロボットとして初めて福島第一原発で作業
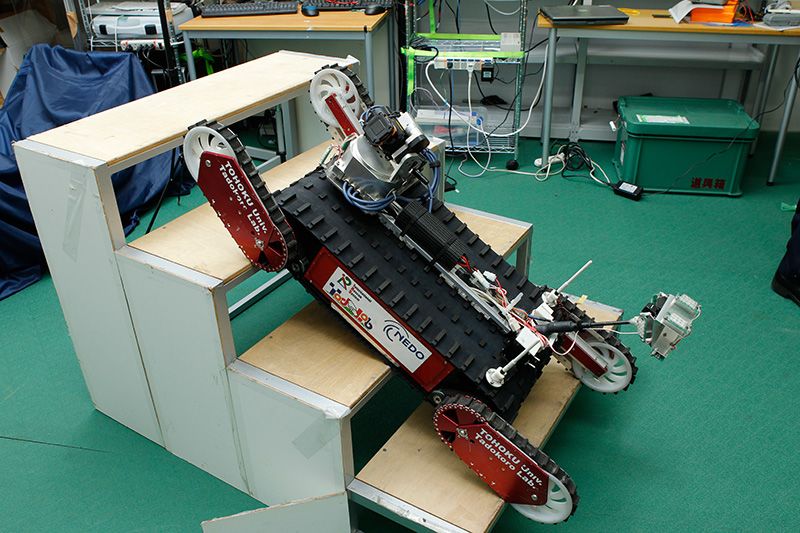 世界一の瓦礫走破性能を誇る災害対応ロボット「Quince」。
世界一の瓦礫走破性能を誇る災害対応ロボット「Quince」。
現地で活躍するロボットの一つが、千葉工業大学、国際レスキューシステム研究機構、東北大学が中心になって開発した「Quince(クインス)」だ。そもそも地震や火山噴火などに伴う災害対策用に開発されたもので、階段や悪路で高い走行性能を誇る。
原子炉建屋内での使用のため、放射線に対する耐久性を入念にテストし、一部改良を加えた。2011年6月に派遣されたクインス1号機は建屋内のダストサンプリングを行い,原子炉2号機建屋5階の撮影や線量計測を行うなど活躍したが、途中で無線が途絶えて現在は動いていない。改良を加えたクインス2号機と3号機は千葉工業大学により2012年2月から現地に投入されている。
ユーザーの使い方に合わせてロボットを進化させる
 クインスを開発した東北大学の田所諭教授は今回の厳しい経験の中で新たな気づきがあったという。
クインスを開発した東北大学の田所諭教授は今回の厳しい経験の中で新たな気づきがあったという。
「ユーザーはロボットが何の役に立つのかわからないし、研究者は現場で何を求められているかがわからないので、両者のコミュニケーションは必須です。ユーザーが自分の使い方に合わせて進化させるスマートフォンのように、ロボットもユーザーが使いながら必要な機能を付与し、進化させるべきではないでしょうか」
田所教授は以前から消防や防災の専門家ら、災害対応ロボットのユーザーと共同で研究開発に取り組んできた。しかし、個別に交流する草の根的な活動はすでに限界。今回のような緊急災害に対応するためにも、幅広いメンバーが集まって活動できる研究開発拠点が必要だと、田所教授は訴える。
人の役に立つロボットを作る
 田所研究室で開発した「能動スコープカメラ」(写真下はカメラ部分の拡大)。繊毛駆動機構を備え、瓦礫が散乱する被災地でも高い走行性能を発揮する。
田所研究室で開発した「能動スコープカメラ」(写真下はカメラ部分の拡大)。繊毛駆動機構を備え、瓦礫が散乱する被災地でも高い走行性能を発揮する。
その拠点で作られるロボットとはどのようなものだろうか? 田所教授が考えるロボットのあるべき姿とはどのようなものだろうか?
「ユーザーが必要なのは人間の災害対応能力を高める便利な道具ですから、そのニーズに応えることが最重要だと思っています。ロボットが人型であるべきかどうか、自律型かどうかといった議論には興味がありません。あえてロボットを定義すれば『機械、電子(センサや回路等)、情報処理、ヒューマンインターフェースという4つの要素が組み合わさって機能するもの』となりますが、ロボットと呼ばれなくてもいいから、人々の役に立つものを作りたいと考えています」
ロボットという言葉の解釈は人それぞれだろう。しかし、考え方が多様だからこそ、さまざまなスタイルで発展する可能性を秘めている。定義付けすることはロボットの将来性を狭めることになりかねない。
クインスは人間に代わって危険な区域で作業することで、作業員の被ばく線量の低減などに貢献している。人間の隣にいなくても、その存在はきちんと人間と共にあり、寄り添っているのである。
取材・文=林 愛子
撮影=大久保 惠造